



Introduction
Bloodsport is a heavyweight combat robot designed for equal parts destruction and entertainment. The fierce robot, a competitor on season seven of the Discovery Channel’s popular show BattleBots, has a 46 in (117 cm) spinning arm designed to inflict maximum damage to any rival robot.
Bloodsport (Figure 1) weighs in at a whopping 250 lb (113 kg), and attacks enemies with an incredible 14 hp (10.4 kW) of drive power, four drive motors, two weapons motors, and up to 30 hp (22.4 kW) of weapon power. Translation: This robot packs a mean punch. With such a wide array of complex offensive and defensive needs, the Bloodsport team had to construct the robot carefully. During the yearlong build process, team members turned to Moku:Go to design, test, and validate essential system components.

Figure 1: Bloodsport, a combat robot on season seven of BattleBots
Moku:Go is a flexible, portable software-defined instrumentation solution from Liquid Instruments tailored for engineering education and general industry. The software-defined functionality enables Moku:Go to provide 15+ different instruments commonly used in electronics and telecommunication labs in one compact device. With up to four power supplies, a digital input/output port, two analog inputs, and two analog outputs, Moku:Go provides a great asset for end-to-end robotics testing.
The challenge
Combat robots are comprised of many interconnected subsystems. They need to work individually, work together, and — as much as possible — keep working as the robot gets flipped, stabbed, cut, and smashed. Their interfaces are designed to isolate faults and their components are specified for very wide operating regimes. Still, no manufacturer specifies their designs for behavior in the face of an angle grinder. Thus system-, subsystem-, and component-level test and validation are critical for a successful campaign.
By verifying components and thoroughly vetting every part of the design with Moku:Go, the team can ensure that Bloodsport holds its own during battle. During competition, team members have extremely limited space in the arena to set up their robot and the corresponding test equipment. From various parts and lab materials, to the robot itself and the designated crew, everything must fit in an assigned 10 ft x 10 ft (3 m x 3 m) room. With such limited space allowed, the team needed equipment that was compact and portable.
Once in the ring, most combat robots don’t take sensor input or modulate signals coming in or out. Riko Balakit, the team’s telemetry lead and key software developer, sought to introduce new design improvements to make Bloodsport drive more like a video game.
The solution
To test the various required electrical components and subsystems, the Bloodsport team used Moku:Go’s Oscilloscope, one of the 15+ instruments available on the device. Before introducing Moku:Go into the design process, Riko relied on a small-screened, portable oscilloscope that lacked an intuitive interface and didn’t offer the performance specifications or additional features required to complete the design evaluations. Instead of enduring busy Austin, Texas, traffic to go to a lab, Moku:Go allowed Riko to work remotely and test at home without sacrificing bench space for a traditional oscilloscope (Figure 2).
“The interface on the Moku:Go is something I like about it,” Riko said. “It’s really compact.”

Figure 2: Riko’s at-home component testing setup featuring the Moku:Go Oscilloscope, Waveform Generator, and Power Supplies
Since Riko was 2,000 mi (3,200 km) away from the rest of the team, easy data sharing was a crucial requirement for any test and measurement equipment used. They were easily able to share screenshots and video captures from Austin all the way to Boston, Massachusetts. Group debugging sessions were so much easier, while screen sharing the Moku:Go application.
While using the embedded Waveform Generator and Oscilloscope, Riko was able to verify signal fidelity and easily export the results to the rest of the team. Moku:Go’s usefulness didn’t stop at home. Once the team gathered at the arena for battle, Moku:Go was compact enough to bring along for last-minute testing and verification.
The result
The team completed extensive component testing throughout the design process. They identified essential components for microcontroller protection, proved subsystem interconnections, and determined which parts needed further evaluation. Once Riko started using Moku:Go, the team discovered that the optocouplers they chose did not have a slew rate sufficient to reliably support their internal communications bus.
By verifying the optocouplers, they improved controllability and robustness while in the ring (Figure 3). The team plans to use Moku:Go to test new couplers early in the process to eliminate any components that cannot provide top performance. Additionally, team members verified bulk capacitors and diodes chosen to prevent voltage spikes from the 30 to 60 V batteries. They confirmed operation and tweaked designs on battery elimination circuits, directly protecting the microcontrollers in the system from receiving voltages higher than 5 V.
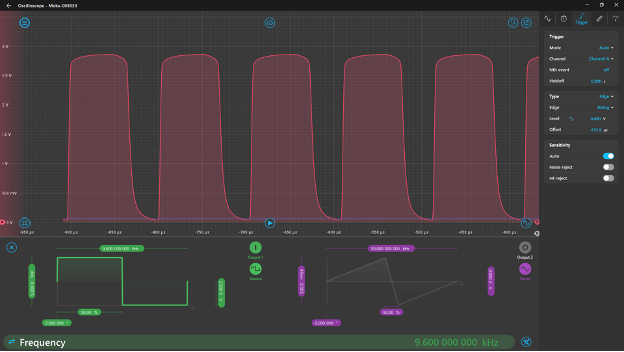
Figure 3: Verifying operation of the optocouplers using the Oscilloscope
Looking ahead, Riko plans to use the Moku:Go Logic Analyzer / Pattern Generator to verify microcontroller communication. When testing design improvements, such as new microcontrollers and smaller components, the team will also use Moku:Go to verify functionality and performance.
“It’s so easy to use,” Riko said. “It takes just a couple minutes to pull it out of the box and set it up, and it’s working.”
Tune in to BattleBots on March 30 on the Discovery Channel to see Bloodsport in action against Rotator.
To learn more about Moku:Go or if you’d like to schedule a demonstration, contact us at info@liquidinstruments.com.